OpenCV计算机视觉实战 - Task6 - 答题卡识别判卷【项目实战】(附完整代码)
本文共 8627 字,大约阅读时间需要 28 分钟。
#################################################################
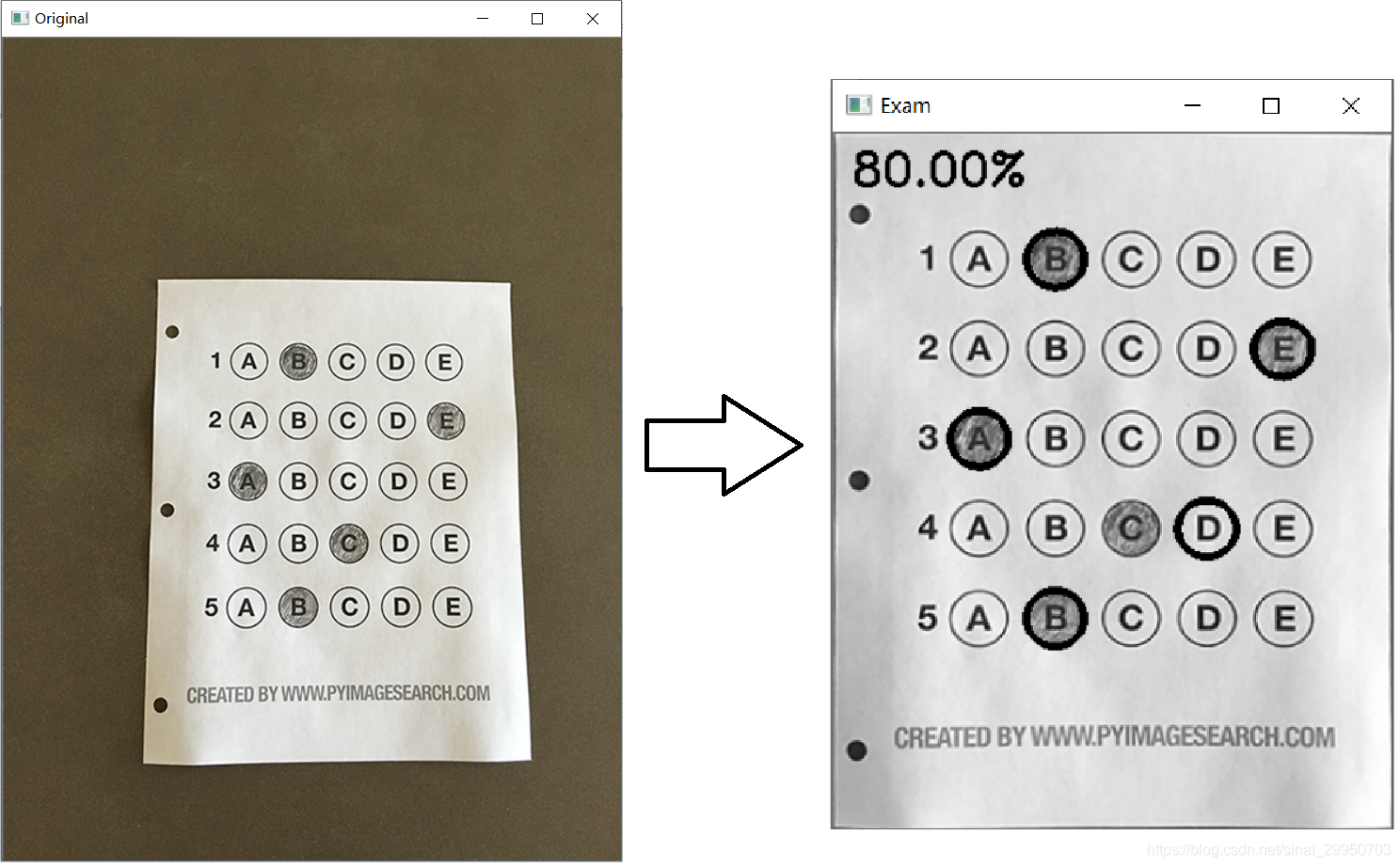
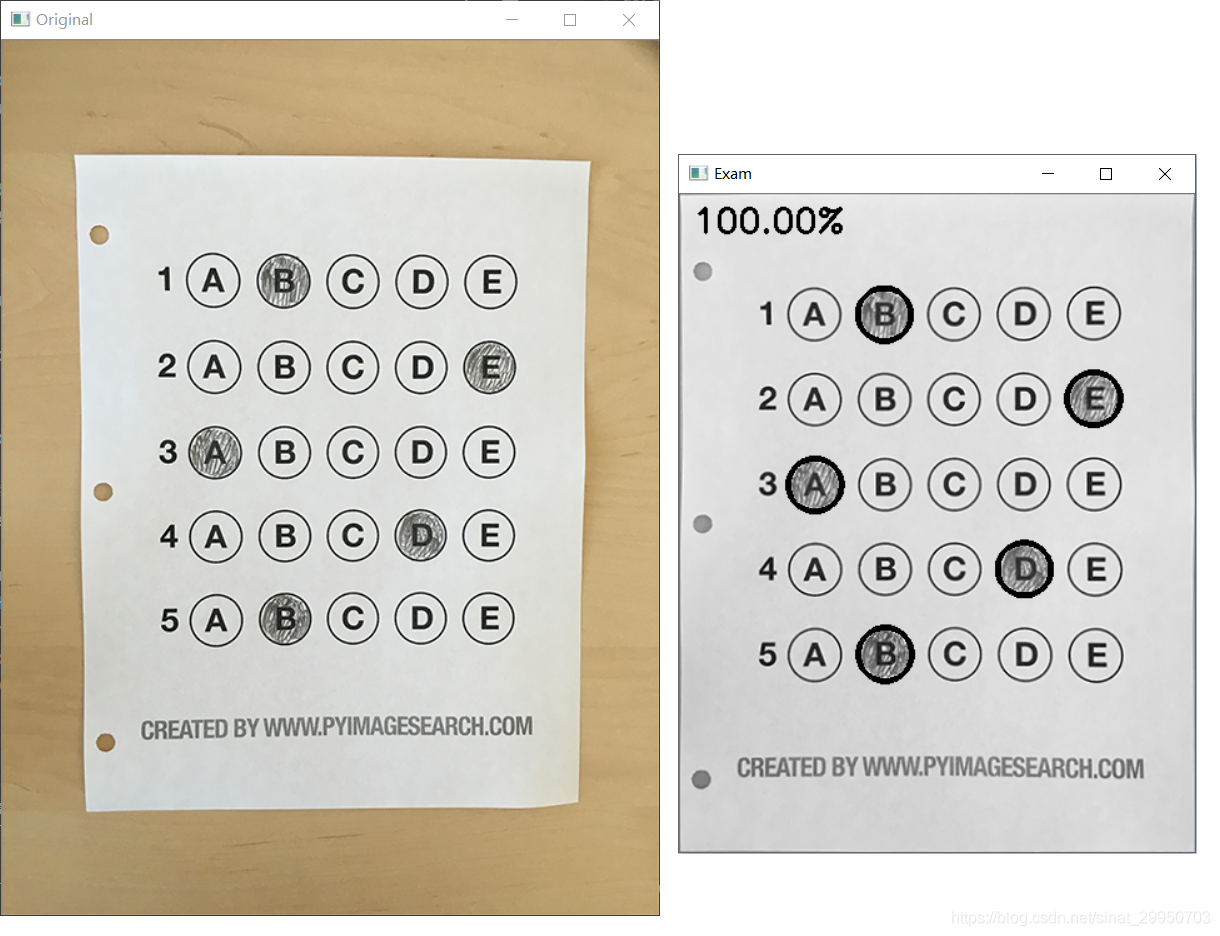
【纸上得来终觉浅,绝知此事要躬行】 视频 新课件:https://pan.baidu.com/s/1frWHqCVGR2VTn5QBtW4lPA 提取码:xh02 老课件:https://pan.baidu.com/s/1Wi31FxSPBqWiuJX9quX-jA 提取码:bbfg ################################################################答题卡识别效果
1-4 基础操作+透视变换
1-4是基础操作, 3是做近似变换, 取最大的那个轮廓,最有可能是图像最大外围的轮廓
3的近似变换 和 4的透视变换原理 可以参考我的
# 1.预处理image = cv2.imread(args["image"])contours_img = image.copy()gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)blurred = cv2.GaussianBlur(gray, (5, 5), 0)cv_show('blurred',blurred)edged = cv2.Canny(blurred, 75, 200)cv_show('edged',edged)# 2.轮廓检测cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1]cv2.drawContours(contours_img,cnts,-1,(0,0,255),3) cv_show('contours_img',contours_img)docCnt = None# 3.确保检测到了if len(cnts) > 0: # 根据轮廓大小进行排序 cnts = sorted(cnts, key=cv2.contourArea, reverse=True) # 遍历每一个轮廓 for c in cnts: # 近似 peri = cv2.arcLength(c, True) approx = cv2.approxPolyDP(c, 0.02 * peri, True) # 准备做透视变换 if len(approx) == 4: docCnt = approx break# 4.执行透视变换warped = four_point_transform(gray, docCnt.reshape(4, 2))cv_show('warped',warped) 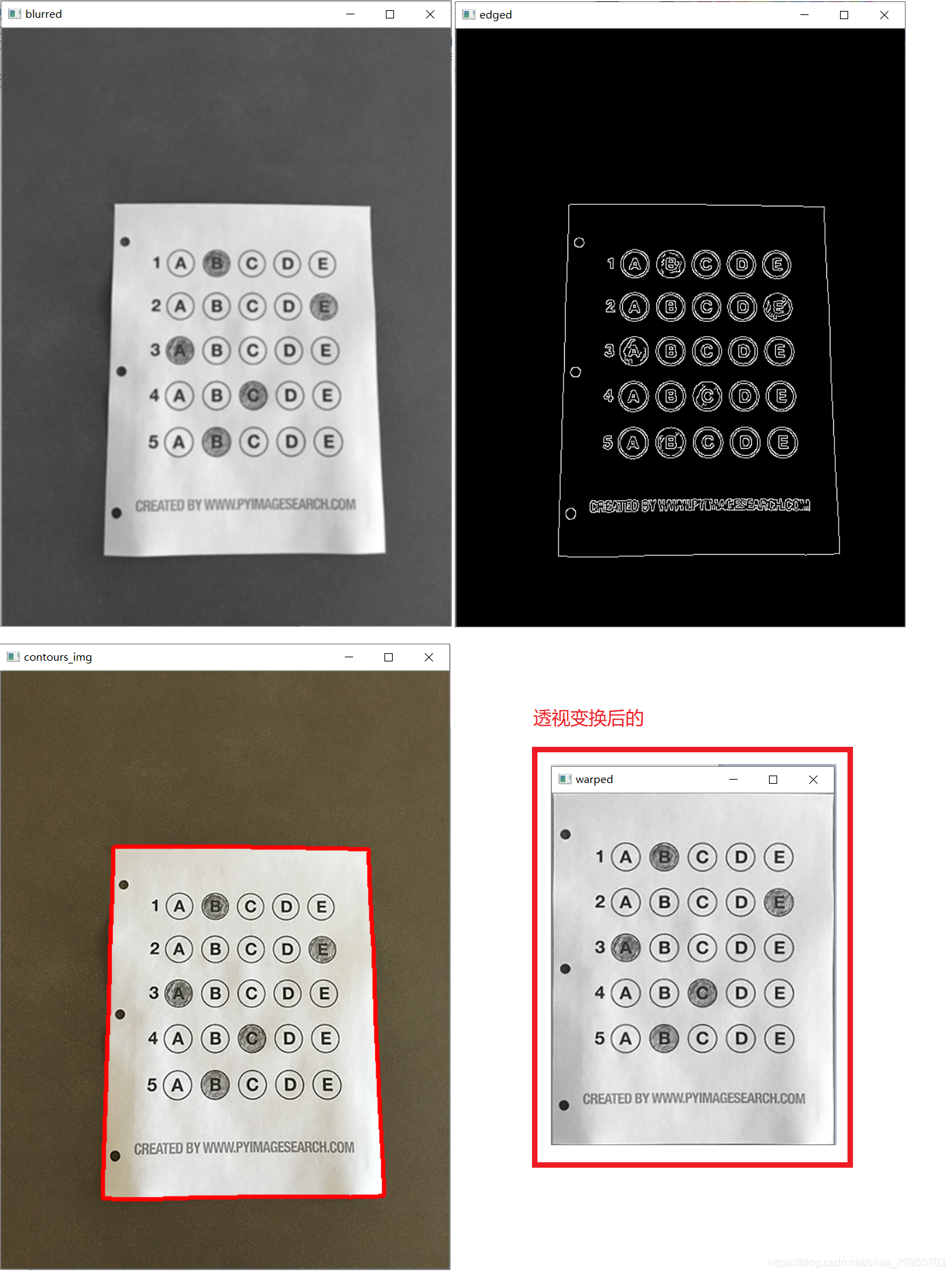
5-6 阈值处理+轮廓检测
5.Otsu’s 阈值处理
THRESH_OTSU会自动寻找合适的阈值,适合双峰,需把阈值参数设置为0 在我的中出现也有应用(第三、五部分)6.然后怎么区分涂和没涂的圆?
这里不用霍夫变换,因为有些涂完后 会突出边界,如下
# 5.Otsu's 阈值处理thresh = cv2.threshold(warped, 0, 255, cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1] cv_show('thresh',thresh)thresh_Contours = thresh.copy()# 6.找到每一个圆圈轮廓cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1]cv2.drawContours(thresh_Contours,cnts,-1,(0,0,255),3) cv_show('thresh_Contours',thresh_Contours)questionCnts = [] 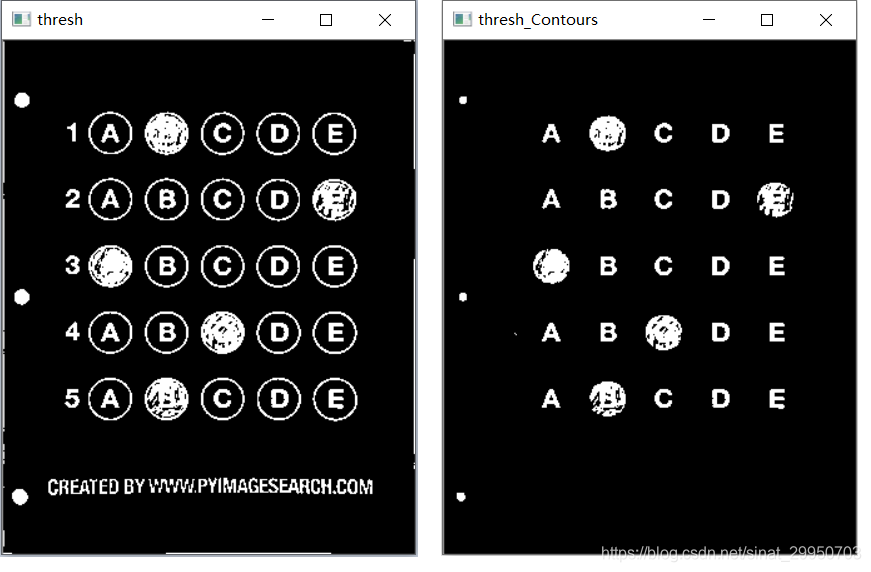
7-8 筛选答题圈
7.遍历所有圆圈轮廓(包括干扰项) 筛选出答题区域的圆,其轮廓存于questionCnts
无论是圆形还是矩形的答题卡,都是规则的形状,比例相同. 所以这里要人工设定圆圈外接矩形的长宽比例 参考 (第四部分)8.按照从上到下(从左到右)进行排序
参考 (第二部分)# 7.遍历所有圆圈轮廓(包括干扰项) 筛选出答题区域的圆for c in cnts: # 计算比例和大小 (x, y, w, h) = cv2.boundingRect(c) ar = w / float(h) # 根据实际情况指定标准 -- 过滤操作 if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1: questionCnts.append(c)# 8.按照从上到下进行排序questionCnts = sort_contours(questionCnts, method="top-to-bottom")[0]correct = 0
9.每行的5个选项 分别比对正确答案
答题圈的轮廓questionCnts长度应为25, 间隔5, 可以遍历5次, 则
q 取0 1 2 3 4,共5行; i 表示从第几个轮廓开始:0,5,10,15,20. 即每行的第一个轮廓# 9.每行的5个选项 分别比对正确答案for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)): # 9.1排序 cnts = sort_contours(questionCnts[i:i + 5])[0] bubbled = None # 9.2 遍历每一个结果 for (j, c) in enumerate(cnts): # 9.2.1 使用mask来判断结果 mask = np.zeros(thresh.shape, dtype="uint8") cv2.drawContours(mask, [c], -1, 255, -1) #-1表示填充 cv_show('mask',mask) # 9.2.2 通过计算非零点数量来算是否选择这个答案 mask = cv2.bitwise_and(thresh, thresh, mask=mask) total = cv2.countNonZero(mask) # 9.2.3 通过阈值判断 if bubbled is None or total > bubbled[0]: bubbled = (total, j) # 9.3 获取正确答案 color = (0, 0, 255) k = ANSWER_KEY[q] # 9.4 对比答案 并 判断正确 if k == bubbled[1]: color = (0, 255, 0) correct += 1 # 9.5 绘图 cv2.drawContours(warped, [cnts[k]], -1, color, 3) 9.1 确保每一行的顺序为A B C D E
9.2 同样这么一行里,这5个框有什么不同.
j 取每个选项0 1 2 3 4
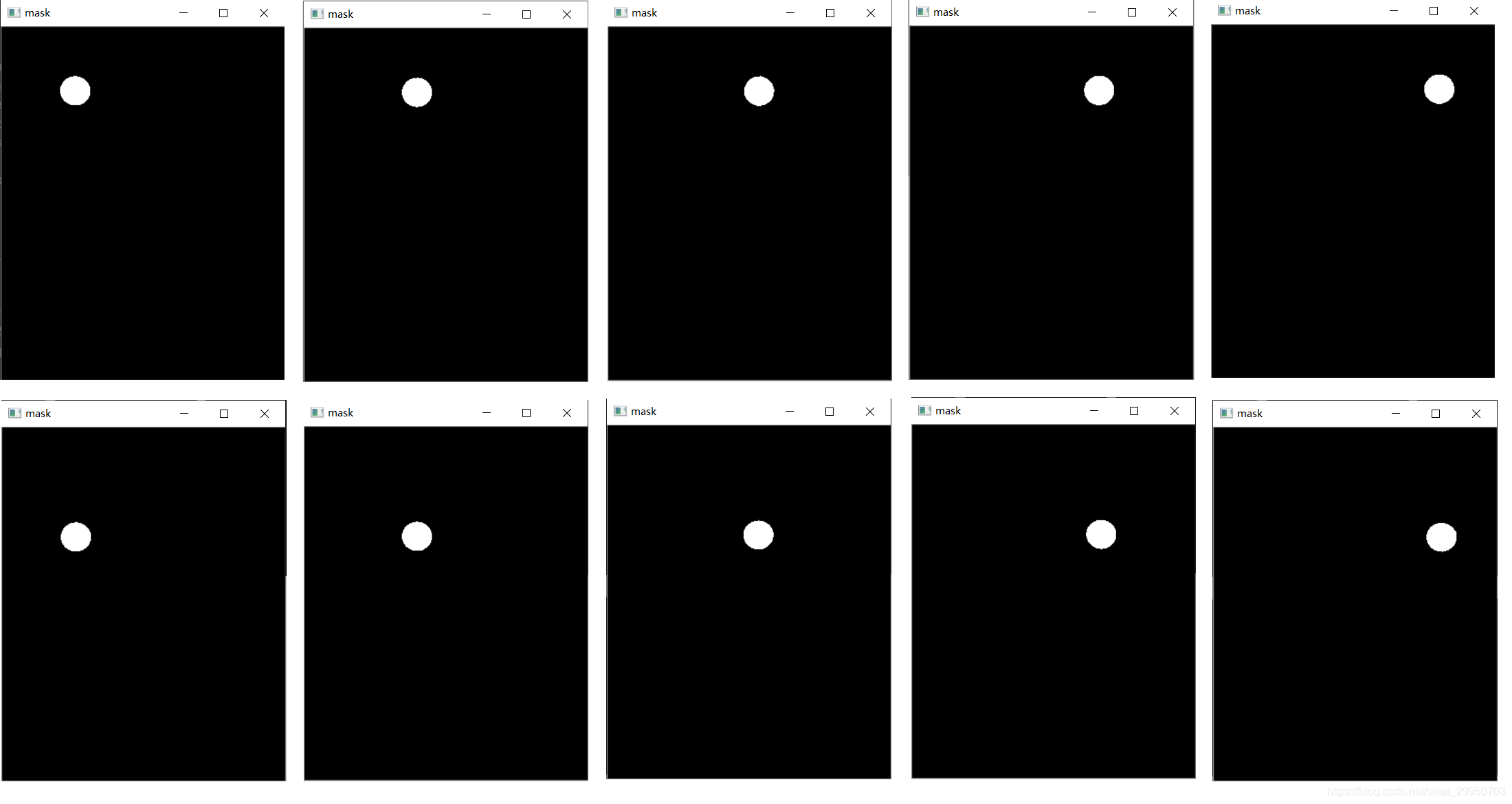
9.2.1 使用mask来判断结果
初始化一个 跟透视变换后的图 一样大小的mask(全黑)
然后在mask上, 画出当前遍历的这个(圆圈)轮廓c, 画成白色- cv2.drawContours (传入绘制图像,轮廓,轮廓索引,颜色模式,线条厚度) 参考 补充一点:线条厚度 为负值或CV_FILLED 表示填充轮廓内部
一行遍历5个选项,5行一共25个选项,这展示前两行的遍历结果,后三行同理…
9.2.2 与操作
一张图片 跟 一张相同大小的黑白图片 进行与操作,则只保留图片的白色区域
-
cv2.bitwise_and(src1, src2, dst=None, mask=None)
对图像(灰度图像或彩色图像均可)每个像素值进行二进制“与”操作, 1&1=1,1&0=0,0&1=0,0&0=0函数返回值: 调用时若无mask参数 则返回src1 & src2,若存在mask参数,则返回src1 & src2 & mask
src1:输入原图1
src2:输入原图2, src1与src2可以相同也可以不相同,可以是灰度图像也可以是彩色图像 dst:输出矩阵,和输入矩阵一样的尺寸和类型 若存在参数时:src1 & src2 或者 src1 & src2 & mask mask:可以是单通道8bit灰度图像,也可以是矩阵,一般为二值化后的图像,指定要更改的输出数组的元素 -
cv2.countNonZero统计非零像素点个数
9.2.3 依次判断5个选项的哪个非零值最大(即哪个被填充上了)
total > bubbled[0] 比它大的才保留到bubbled
bubbled 保留最大的选项( 即填充上的选项 ) j9.3 k = ANSWER_KEY[q] 是第几题(行)的正确答案
9.4 若k = bubbled[1],判断正确,correct+=1
.
10.打印正确率
# 10.打印正确率score = (correct / 5.0) * 100print("[INFO] score: {:.2f}%".format(score))cv2.putText(warped, "{:.2f}%".format(score), (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 255, 0), 2)cv2.imshow("Original", image)cv2.imshow("Exam", warped)cv2.waitKey(0) 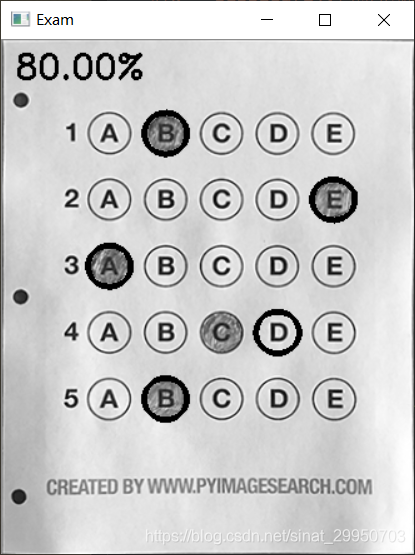
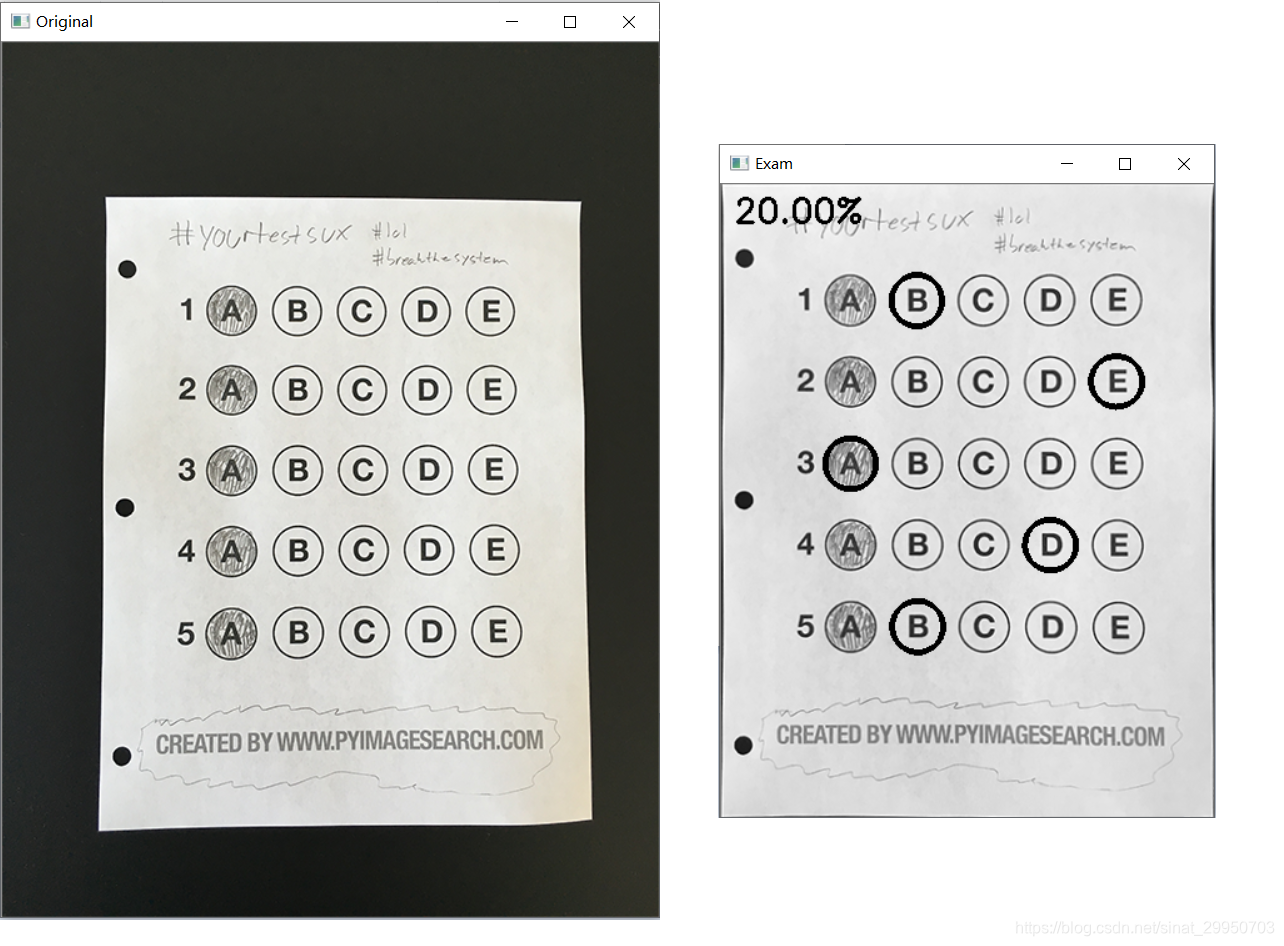
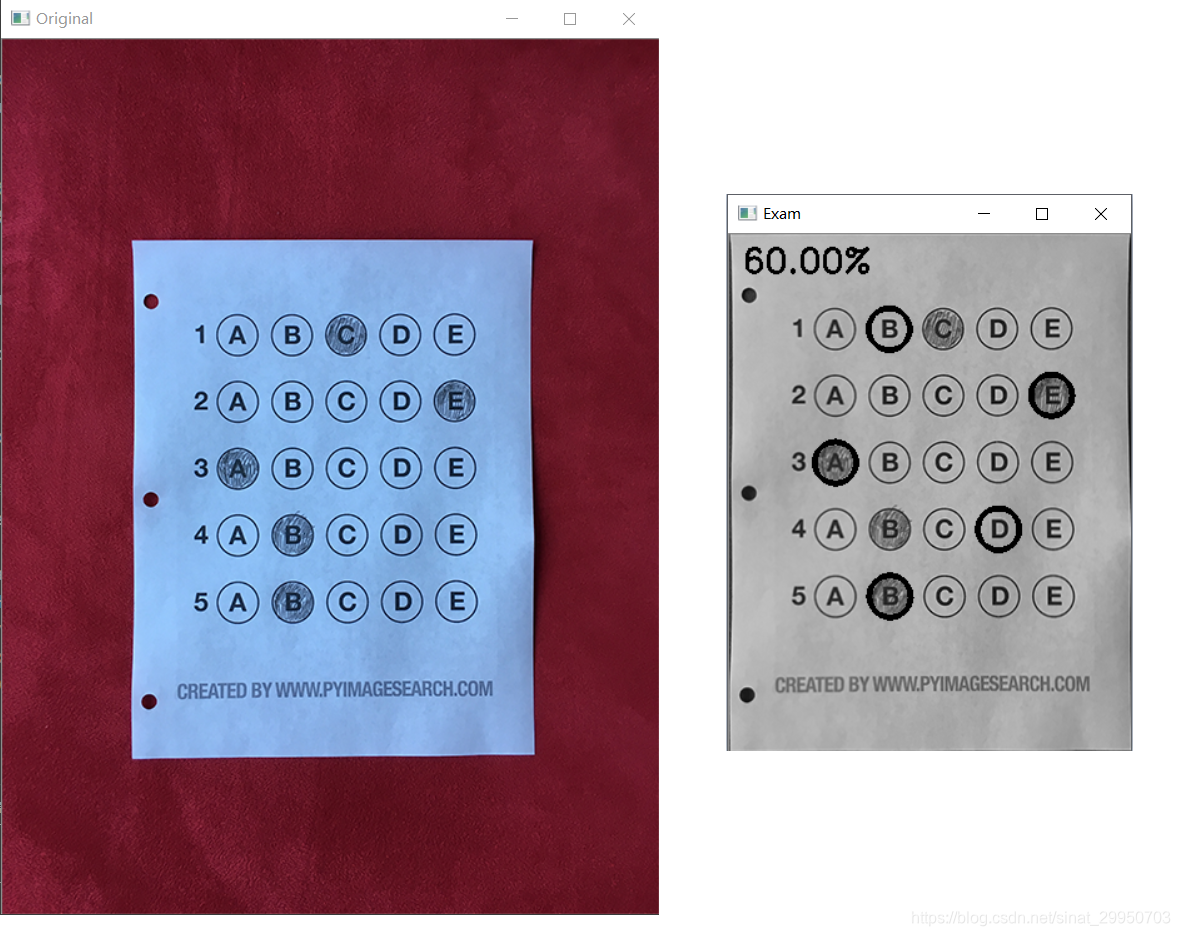
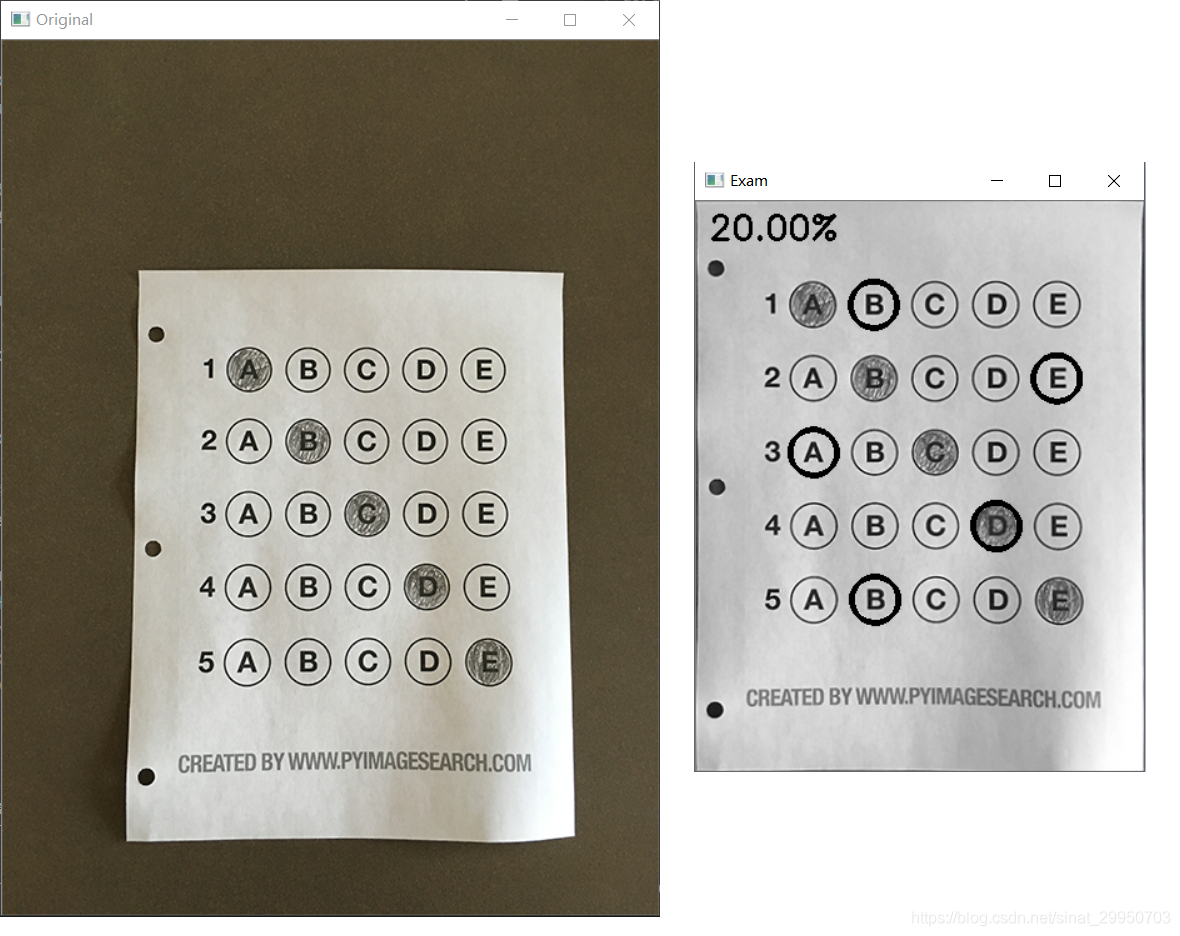
* 测试其他答题卡效果
结束语
虽然代码有点长,但大部分内容都是前面几个项目有用到的知识。可见遇到不同场景的举一反三能力多重要啦
扩展
有兴趣的同学们 可以尝试一下矩形答题卡的识别
完整代码
一个py文件,3个函数
# 导入工具包import numpy as npimport argparseimport cv2def order_points(pts): # 一共4个坐标点 rect = np.zeros((4, 2), dtype = "float32") # 按顺序找到对应坐标0123分别是 左上,右上,右下,左下 # 计算左上,右下 s = pts.sum(axis = 1) rect[0] = pts[np.argmin(s)] rect[2] = pts[np.argmax(s)] # 计算右上和左下 diff = np.diff(pts, axis = 1) rect[1] = pts[np.argmin(diff)] rect[3] = pts[np.argmax(diff)] return rectdef four_point_transform(image, pts): # 获取输入坐标点 rect = order_points(pts) (tl, tr, br, bl) = rect # 计算输入的w和h值 widthA = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2)) widthB = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2)) maxWidth = max(int(widthA), int(widthB)) heightA = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2)) heightB = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2)) maxHeight = max(int(heightA), int(heightB)) # 变换后对应坐标位置 dst = np.array([ [0, 0], [maxWidth - 1, 0], [maxWidth - 1, maxHeight - 1], [0, maxHeight - 1]], dtype = "float32") # 计算变换矩阵 M = cv2.getPerspectiveTransform(rect, dst) warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight)) # 返回变换后结果 return warpeddef sort_contours(cnts, method="left-to-right"): reverse = False i = 0 if method == "right-to-left" or method == "bottom-to-top": reverse = True if method == "top-to-bottom" or method == "bottom-to-top": i = 1 boundingBoxes = [cv2.boundingRect(c) for c in cnts] (cnts, boundingBoxes) = zip(*sorted(zip(cnts, boundingBoxes), key=lambda b: b[1][i], reverse=reverse)) return cnts, boundingBoxesdef cv_show(name,img): cv2.imshow(name, img) cv2.waitKey(0) cv2.destroyAllWindows() '''下面为主函数'''if __name__ == "__main__": # 设置参数 ap = argparse.ArgumentParser() ap.add_argument("-i", "--image", required=True, help="path to the input image") args = vars(ap.parse_args()) # 正确答案 ANSWER_KEY = { 0: 1, 1: 4, 2: 0, 3: 3, 4: 1} # 1.预处理 image = cv2.imread(args["image"]) contours_img = image.copy() gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) blurred = cv2.GaussianBlur(gray, (5, 5), 0) cv_show('blurred',blurred) edged = cv2.Canny(blurred, 75, 200) cv_show('edged',edged) # 2.轮廓检测 cnts = cv2.findContours(edged.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1] cv2.drawContours(contours_img,cnts,-1,(0,0,255),3) cv_show('contours_img',contours_img) docCnt = None # 3.确保检测到了 if len(cnts) > 0: # 根据轮廓大小进行排序 cnts = sorted(cnts, key=cv2.contourArea, reverse=True) # 遍历每一个轮廓 for c in cnts: # 近似 peri = cv2.arcLength(c, True) approx = cv2.approxPolyDP(c, 0.02 * peri, True) # 准备做透视变换 if len(approx) == 4: docCnt = approx break # 4.执行透视变换 warped = four_point_transform(gray, docCnt.reshape(4, 2)) cv_show('warped',warped) # 5.Otsu's 阈值处理 thresh = cv2.threshold(warped, 0, 255, cv2.THRESH_BINARY_INV | cv2.THRESH_OTSU)[1] cv_show('thresh',thresh) thresh_Contours = thresh.copy() # 6.找到所有轮廓 cnts = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)[1] cv2.drawContours(thresh_Contours,cnts,-1,(0,0,255),3) cv_show('thresh_Contours',thresh_Contours) questionCnts = [] # 7.遍历所有圆圈轮廓(包括干扰项) 筛选出答题区域的圆 for c in cnts: # 计算比例和大小 (x, y, w, h) = cv2.boundingRect(c) ar = w / float(h) # 根据实际情况指定标准 -- 过滤操作 if w >= 20 and h >= 20 and ar >= 0.9 and ar <= 1.1: questionCnts.append(c) # 8.按照从上到下进行排序 questionCnts = sort_contours(questionCnts, method="top-to-bottom")[0] correct = 0 # 9.每行的5个选项 分别比对正确答案 for (q, i) in enumerate(np.arange(0, len(questionCnts), 5)): # 9.1排序 cnts = sort_contours(questionCnts[i:i + 5])[0] bubbled = None # 9.2 遍历每一个结果 for (j, c) in enumerate(cnts): # 9.2.1 使用mask来判断结果 mask = np.zeros(thresh.shape, dtype="uint8") cv2.drawContours(mask, [c], -1, 255, -1) #-1表示填充 # cv_show('mask',mask) # 9.2.2 通过计算非零点数量来算是否选择这个答案 mask = cv2.bitwise_and(thresh, thresh, mask=mask) total = cv2.countNonZero(mask) # 9.2.3 通过阈值判断 if bubbled is None or total > bubbled[0]: bubbled = (total, j) # 9.3 获取正确答案 color = (0, 0, 255) k = ANSWER_KEY[q] # 9.4 对比答案 并 判断正确 if k == bubbled[1]: color = (0, 255, 0) correct += 1 # 9.5 绘图 cv2.drawContours(warped, [cnts[k]], -1, color, 3) # 10.打印正确率 score = (correct / 5.0) * 100 print("[INFO] score: {:.2f}%".format(score)) cv2.putText(warped, "{:.2f}%".format(score), (10, 30), cv2.FONT_HERSHEY_SIMPLEX, 0.9, (0, 255, 0), 2) cv2.imshow("Original", image) cv2.imshow("Exam", warped) cv2.waitKey(0) 转载地址:http://jujii.baihongyu.com/
你可能感兴趣的文章
Eclipse Theia 1.0 发布,这才是 VS Code 真正的开源替代方案?!
查看>>
堪称开挂!印度裔 00 后 7 岁教人编程,12 岁成 IBM 荣誉顾问,还出过书!
查看>>
为什么魂斗罗只有 128KB 却可以实现那么长的剧情?
查看>>
全球呼吸机告急!医疗科技巨头美敦力 "开源" 设计图和源代码!
查看>>
哇!动辄上千台服务器,到底在干嘛?
查看>>
霸榜 GitHub:去你丫的算法!
查看>>
卧槽!MIT 正式开放 AI 学习资源网,连小孩都能学!
查看>>
前女友让我撸个植物大战僵尸,我一怒之下把代码开源了...
查看>>
卧槽!长达 5000 页的 Java 中文必备手册正式开放下载!
查看>>
不吹不黑!逛 GitHub 没看过这 10 个开源项目,绝对血亏...
查看>>
这才是你需要的 C 语言、C++ 学习路线!
查看>>
IntelliJ IDEA 2020.1 稳定版正式发布!
查看>>
PyCharm 2020.1 稳定版正式发布!
查看>>
苹果新系统遭吐槽!SSH 默认规则被破坏,程序员无法登录 Web 服务器...
查看>>
卧槽!小姐姐用动画图解 Git 命令,这也太秀了吧?!
查看>>
厉害了!Python 编辑器界的神器 Jupyter ,推出官方可视化 Debug 工具!
查看>>
你的银行账户信息,可能正被人拿到暗网上公开售卖!
查看>>
太赞啦!GitHub 重磅宣布,私有仓库将对外免费开放,不限人数!
查看>>
我用 Python 分析了 “青你 2” 漂亮小姐姐的颜值,结果真香!
查看>>
这款开源神器,让你能在 iPad 上随心所欲写代码!
查看>>